Multi-GPU version of DL_MESO_DPD¶
Authors: Jony Castagna
This module implements the first version of the D_MESO_DPD code with multiple NVidia Graphical Processing Units (GPUs). More details about it can be found in the following sections.
Purpose of Module¶
In this module the main framework of a multi-GPU version of the DL_MESO_DPD code has been developed. The exchange of data between GPUs overlaps with the computation of the forces for the internal cells of each partition (a domain decomposition approach based on the MPI parallel version of DL_MESO_DPD has been followed). The current implementation is a proof of concept only and relies on slow transfers of data from the GPU to the host and vice-versa. Faster implementations will be explored in future modules.
In particular, the transfer of data occurs in 3 steps: x-y planes first, x-z planes with halo data (i.e. the values which will fill the ghost cells) from the previous swap and finally the y-z planes with all halos. This avoid the problems of the corner cells, which usually requires a separate communication reducing the number of send/receive calls from 14 to 6.The multi-GPU version has been currently tested with 8 GPUs and successfully reproduce the same results as a single GPU within machine accuracy resolution.
Future plans include benchmarking of the code with different data transfer implementations other than the current (trivial) GPU-host-GPU transfer mechanism. These are: of Peer To Peer communication within a node, CUDA-aware MPI, and CUDA-aware MPI with Direct Remote Memory Access (DRMA).
Background Information¶
This module is part of the DL_MESO_DPD code. Full support and documentation is available at:
To download the DL_MESO_DPD code you need to register at https://gitlab.stfc.ac.uk. Please contact Dr. Micheal Seaton at Daresbury Laboratory (STFC) for further details.
Testing¶
The DL_MESO code is developed using git version control. Currently the GPU version is under a branch named add_gpu_version. After downloading the code, checkout the GPU branch and look into the DPD/gpu_version folder, i.e:
git clone https://gitlab.stfc.ac.uk/dl_meso.git
cd dl_meso
git checkout gpu_version
cd ./DPD/gpu_version
make all
To compile and run the code you need to have installed the CUDA-toolkit (>=8.0) and have a CUDA enabled GPU device (see http://docs.nvidia.com/cuda/#axzz4ZPtFifjw). For the MPI library the OpenMPI 3.1.0 has been used.
The current version has been tested ONLY for the Mixture_Large test case available in the DEMO/DPD folder. To run the case, compile the code using the make all command from the bin directory, copy the FIELD and CONTROL files in this directory and run ./dpd_gpu.exe.
Attention: the HISTORY file produced is currently NOT compatible with the serial version, because this is written in the C binary data format (Fortran files are organised in records,
while C are not. See https://scipy.github.io/old-wiki/pages/Cookbook/FortranIO.html).
However, you can compare the OUTPUT and the export files to verify your results. For more details see the README.rst file in the gpu_version folder.
Performance¶
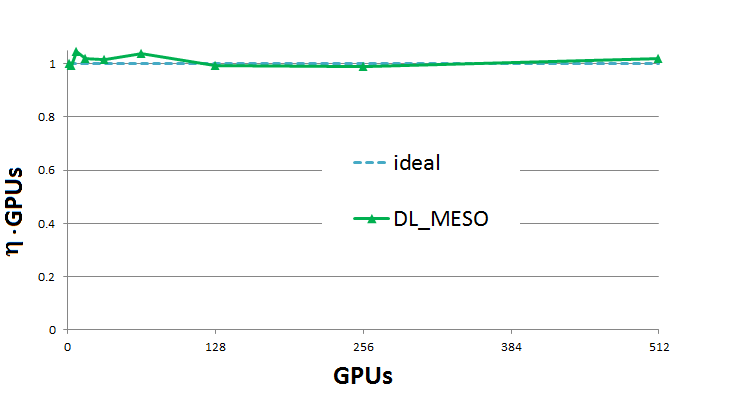
A test case a two phase mixture separation with 1.8 billion particles has been used and run for 100 time steps without IO operations.A weak scaling efficiency ( ) plot up to 512 GPUs (1.2 billion particles) is presented below. This plot is obtained by taking the ratio between the wall time for the GPU count and a reference walltime of two GPUs (the singleGPU version uses a non-scalable, faster, alternative implementation which would skew the results). As can be seen, the result (
) plot up to 512 GPUs (1.2 billion particles) is presented below. This plot is obtained by taking the ratio between the wall time for the GPU count and a reference walltime of two GPUs (the singleGPU version uses a non-scalable, faster, alternative implementation which would skew the results). As can be seen, the result ( ) oscillates near perfect scalability.
) oscillates near perfect scalability.
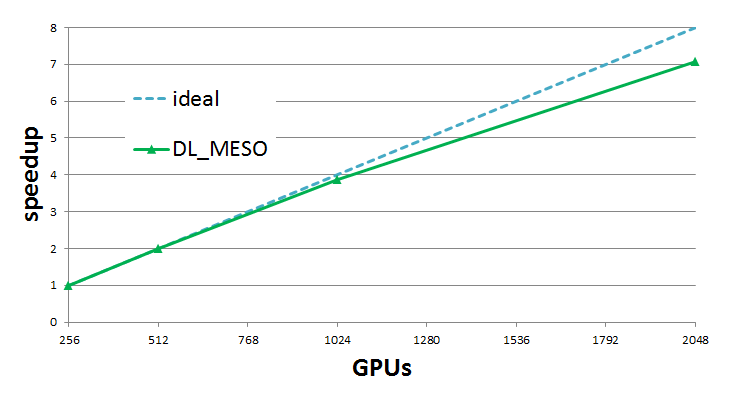
Strong scaling results are obtained using 1.8 billion particles for 256 to 2048 GPUs. Results show very good scaling, with efficiency always above 89% for 2048 GPUs (note that 2048 P100 GPUs on PizDaint is equivalent to almost 10 Petaflops of raw double precision compute performance).
Source Code¶
This module has been merged into DL_MESO code. It is composed of the following commits (you need to be registered as collaborator):