GRASP Sampling¶
Purpose of the Module¶
This module performs a stratified sampling of the configurations, described by vectors, of a system to build a representative training set in a fitting procedure. Given a list of candidate configurations, and selected the size (N) of the training set required, the module executes the combinatorial optimization that maximizes the following dissimilarity score (DS) among the elements of the training set:
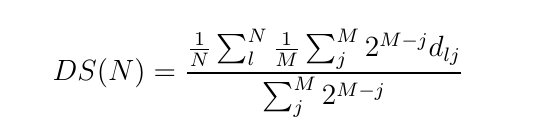
In this formula, the j-th configuration in the sum is the j-th nearest one to the l-th configuration and  is the Euclidean distance between the l-th and j-th configurations. M is the number of the nearest configurations considered in the score. The exponential weight makes the score near independent from the particular value of M, if it is larger than 4-6.
is the Euclidean distance between the l-th and j-th configurations. M is the number of the nearest configurations considered in the score. The exponential weight makes the score near independent from the particular value of M, if it is larger than 4-6.
The combinatorial optimization that maximizes the dissimilarity score is performed using the GRASP algorithm. A stratified sampling can be performed without a combinatorial optimization using classical statistical techniques (for example Latin hypercube sampling), the GRASP sampling becomes useful when the selection is restricted to a predeterminated set of configurations, generated or sampled with specific internal constrains. This is the case of the molecular configurations generated in a molecular dynamics simulation.
Background Information¶
The GRASP algorithm is illustrated in the paper “Feo T. A., Resende M. G., Greedy randomized adaptive search procedures. Journal of global optimization 6, 109-133 (1995)”. The application of the GRASP algorithm to perform a stratified sampling is described in the work “Force Field Parametrization of Metal Ions from Statistical Learning Techniques. J. Chem. Theory Comput., 2018, 14(1), pp 255-273”.
Input/Output Structure¶
The input file, “candidates.txt”, must have the form of an array  , where
, where  is the number of the candidates and
is the number of the candidates and  is the dimension of the vectors. The application of the algorithm provides the files “solution_v_A_B.txt” and “solution_i_A_B.txt” that includes the selected configurations and the corresponding indices respectively. “A” and “B” in the files of the solutions are the number of the selected configurations in the current application of the algorithm and the total number of configurations included in the solutions. A and B can differ because the algorithm can be applied in cumulative mode. The parameters of the algorithm are set in the file “input.gra” (an example is provided in the repository).
is the dimension of the vectors. The application of the algorithm provides the files “solution_v_A_B.txt” and “solution_i_A_B.txt” that includes the selected configurations and the corresponding indices respectively. “A” and “B” in the files of the solutions are the number of the selected configurations in the current application of the algorithm and the total number of configurations included in the solutions. A and B can differ because the algorithm can be applied in cumulative mode. The parameters of the algorithm are set in the file “input.gra” (an example is provided in the repository).
Source Code¶
The source code of the algorithm is included in the “grasp.c” file, available from the E-CAM Gitlab repository. To compile the code execute the Makefile. The GNU Scientific Library is necessary.
Testing¶
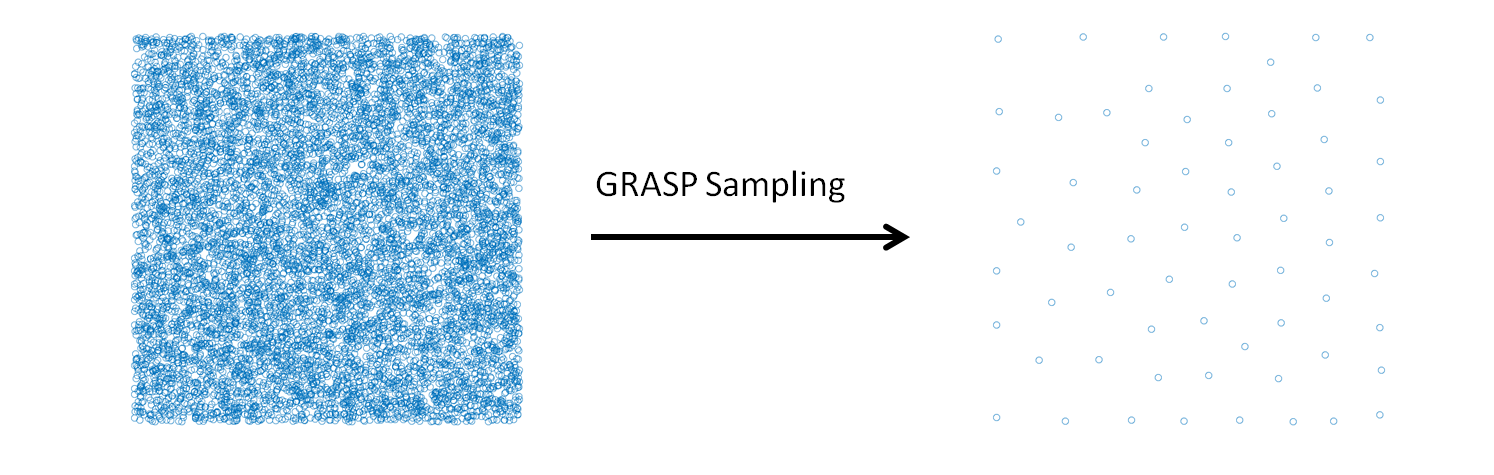
In the example of the “candidates.txt” file are collected 10000 two-dimensional vectors generated randomly, the application of the module produces the selection of a stratified subset that covers all the space of the basin sample. This can be appreciated observing the scatter plot of the two sets. The command to run the test is
$ ./grasp
provided that the “candidates.txt” and “input.gra” files are in the same directory of the executable file. Examples of “candidates.txt” and “input.gra” files are provided in the ./test directory. The name of “input.gra” file cannot be changed, while the name of file where the candidate configurations are defined must be indicated in the first line of the “input.gra” file.